Soft Robotic Manipulator Control
4th year project developing control systems for a soft robotic manipulator using MATLAB and Simulink.
The Challenge
Soft robots present unique control challenges - their non-linear dynamics and continuous deformation make traditional control approaches ineffective. The project focused on a soft pendulum system.
Approach
- System Identification: Characterizing the system's dynamic behavior from experimental data
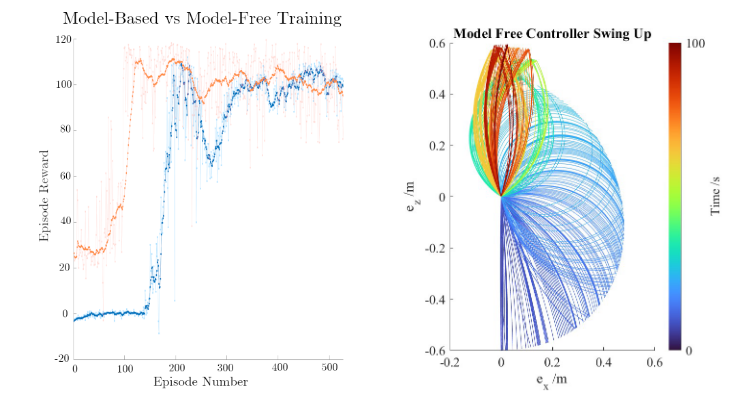
- Model-Based RL: Using learned models to train controllers in simulation
- Neural Networks: Implementing NN-based controllers for handling non-linearities
Tools
MATLAB, Simulink, reinforcement learning toolboxes